Ficheiro:Euclidian and non euclidian geometry.png

Tamaño desta vista previa: 800 × 300 píxeles. Outras resolucións: 320 × 120 píxeles | 640 × 240 píxeles | 1.024 × 384 píxeles | 1.280 × 480 píxeles | 4.000 × 1.500 píxeles.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ficheiro orixinal (4.000 × 1.500 píxeles; tamaño do ficheiro: 128 kB; tipo MIME: image/png)
| Este ficheiro procede de Wikimedia Commons. A continuación móstrase a información da súa páxina de descrición. Commons é un repositorio libre de ficheiros multimedia. Pode contribuír alí cargando as súas imaxes. |
{kind=link}
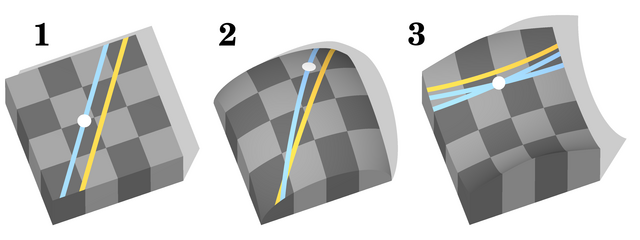
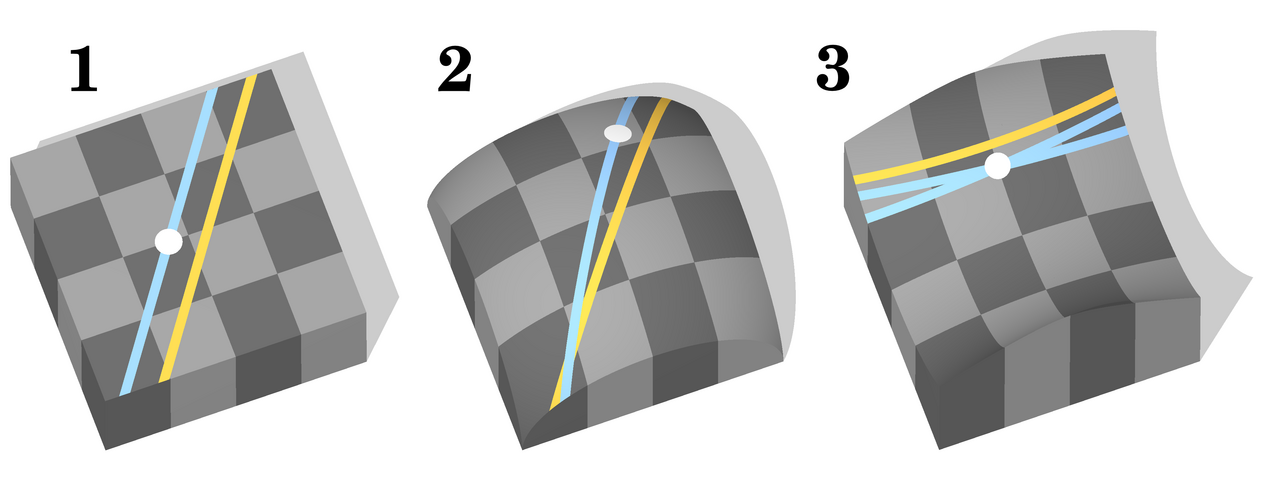
Shows three "blocks" with varying surfaces, whereon a point and som lines are "drawn" to demonstrate
- euclidian
- elliptical and
- hyperbolic geometry
To be exact, the hyperbolic surface was approximated using a chunk of the "inside" of a torus - this may not be perfectly accurate, but apparently it "looks right" in this illustration. :-)
Rendered using POV-Ray (see http://www.povray.org) and the scene description "code" below, then cropped and "numbered" using a graphics software package.
| Povray source code |
|---|
/*
====================================================================
Surfaces demonstrating euclidian, elliptical and hyperbolic geometry
--------------------------------------------------------------------
Created by Søren Peo Pedersen - see my user page at
http://da.wikipedia.org/wiki/Bruger:Peo
====================================================================
*/
// Macro for texture with background pattern, lines, and point "marker"
#macro SurfaceDrawing (
Point, // Position vector: Location of white point
RefLineMove, // Transformation: Where to place the yellow reference line
Lines // Object that renders the blue line(s)
)
#local BasePattern=pigment { // The underlying, dark grey checkerboard pattern
checker
color rgb 0.4
color rgb 0.6
scale <1,1000,1>
}
#local SP1 = pigment { // Checkerboard pattern with yellow "reference line" added
object {box {<-.07,-10,-10>,<.07,10,10> transform{RefLineMove}}
pigment {BasePattern}
pigment {color rgb <1,.8,.3>}
}
}
#local SP2 = pigment { // Checkerborad + yellow line with user-defined (blue) lines added
object {Lines
pigment {SP1}
pigment {color rgb <.6,.8,1>}
}
}
#local SP3 = pigment { // Checkerboard + lines with whit point "marker" added
object {
sphere { Point, .2 }
pigment {SP2}
pigment {color rgb 1}
}
}
pigment { // Definition of pigment, confined to a box slightly smaller than the "blocks"
boxed // to make the lines and point only appear on the top of the blocks
pigment_map {
[0.0000 BasePattern scale .5 translate <0,-1,0>]
[0.0001 BasePattern scale .5 translate <0,-1,0>]
[0.0001 SP3 scale .5 translate <0,-1,0>]
[1.0000 SP3 scale .5 translate <0,-1,0>]
}
scale <2,2,2> translate <0,2,0>
}
finish {ambient .7 diffuse .3}
#end // End of macro
plane {<0,1,0>,0 // White "tabletop" to receive shadows of the blocks (helps visualisation)
pigment {color rgb 1}
finish {ambient .8 diffuse .5}
}
box {<-2,0,-2>,<2,2,2> // Demonstrating euclidean geometry
texture {
SurfaceDrawing(<-.3,2,0>,
transform {rotate <0,35,0> translate <.3,0,0>},
box {<-.07,-10,-10>,<.07,10,10> rotate <0,35,0> translate <-.3,0,0>}
)
}
rotate <0,-20,0>
translate <-6,0,0>
}
intersection { // Demonstrating elliptical, or "Riemann", geometry
box {<-2,0,-2>,<2,5,2>}
sphere {<0,0,0>,2.8285}
texture {
SurfaceDrawing(<.65,2.45,1.25>,
transform {rotate <0,5,0> rotate <-45,35,0>},
box {<-.07,-10,-10>,<.07,10,10> rotate <0,-4,0> rotate <-45,35,0>}
)
}
rotate <0,-20,0>
translate <0,0,0>
}
intersection { // Demonstrating hyperbolic geometry
box {<-2,0,-2>,<2,4,2>}
torus {7.03,5 rotate <90,90,0> translate <0,4,0>}
texture {
SurfaceDrawing(<0,2.3,1>,
transform {rotate <0,90,0> rotate <-40,0,0> translate <0,4,0>},
merge {
box {<-.07,-10,-10>,<.07,10,10>
rotate <0,85,0> rotate <-30,0,0> translate <0,4,0>
}
box {<-.07,-10,-10>,<.07,10,10>
rotate <0,95,0> rotate <-30,0,0> translate <0,4,0>
}
}
)
}
rotate <0,-20,0>
translate <6,0,0>
}
camera { // Viewpoint
location <0,2100,-800>
look_at <.5,0,0>
angle .47
}
light_source {<-50,200,-100> color rgb 1.5} // Illumination
|
Eu, como posuidor dos dereitos de autor desta obra, pola presente publícoa baixo as seguintes licenzas:

|
Autorízase a copia, distribución e/ou modificación deste documento baixo os termos da licenza de documentación libre GNU, versión 1.2 ou calquera outra que posteriormente publique a Free Software Foundation; sen seccións invariables, textos de portada, nin textos de contraportada. Inclúese unha copia da devandita licenza na sección titulada GNU Free Documentation License. |
| Este ficheiro está licenciado baixo a licenza Creative Commons recoñecemento compartir igual 3.0 sen adaptar. | ||
| ||
| A etiqueta desta licenza engadiuse a este ficheiro como parte da actualización da licenza GFDL. |
Pode seleccionar a licenza que desexe.
Historial do ficheiro
Prema nunha data/hora para ver o ficheiro tal e como estaba nese momento.
| Data/Hora | Miniatura | Dimensións | Usuario | Comentario | |
|---|---|---|---|---|---|
| actual | 5 de xullo de 2015 ás 21:47 | 4.000 × 1.500 (128 kB) | Cmdrjameson | Compressed with pngout. Reduced by 66kB (34% decrease). | |
| 4 de agosto de 2012 ás 19:13 | 4.000 × 1.500 (194 kB) | Morn | redone at higher resolution | ||
| 7 de abril de 2005 ás 23:21 | 790 × 310 (47 kB) | Peo~commonswiki | Shows three "blocks" with varying surfaces, whereon a point and som lines are "drawn" to demonstrate #euclidian #elliptical and #hyperbolic geometry Rendered using POV-Ray (see http://www.povray.org) and the scene description "code" below, then cropped an |
{kind=link}
{kind=link}
Uso do ficheiro
A seguinte páxina usa este ficheiro:
Uso global do ficheiro
Os seguintes wikis empregan esta imaxe:
- Uso en ar.wikipedia.org
- Uso en arz.wikipedia.org
- Uso en ast.wikipedia.org
- Uso en az.wikipedia.org
- Uso en ba.wikipedia.org
- Uso en bg.wikipedia.org
- Uso en cs.wikipedia.org
- Uso en en.wikipedia.org
- Uso en eo.wikipedia.org
- Uso en et.wikipedia.org
- Uso en fa.wikipedia.org
- Uso en fr.wikipedia.org
- Uso en he.wikipedia.org
- Uso en hy.wikipedia.org
- Uso en id.wikipedia.org
- Uso en ja.wikipedia.org
- Uso en ka.wikipedia.org
- Uso en kk.wikipedia.org
- Uso en la.wikipedia.org
- Uso en nl.wikipedia.org
- Uso en nn.wikipedia.org
- Uso en no.wikipedia.org
- Uso en pl.wikipedia.org
- Uso en tg.wikipedia.org
- Uso en tt.wikipedia.org
- Uso en uk.wikipedia.org
- Uso en uk.wikiquote.org
- Uso en uz.wikipedia.org
- Uso en vi.wikipedia.org
- Uso en www.wikidata.org
{kind=link}